SLAM学习笔记
本文最后更新于:2022年9月13日 07:54
参考资料:
- 《SLAM十四讲》高翔
概述
经典视觉 SLAM 框架
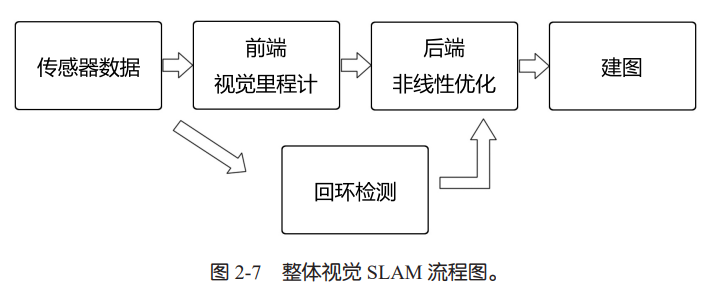
传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果是在机器人 中,还可能有码盘、惯性传感器等信息的读取和同步。
视觉里程计(Visual Odometry,VO)。视觉里程计的任务是估算相邻图像间相机的运动,以 及局部地图的样子。VO 又称为前端(Front End)。
后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的 信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,又称为后端(Back End)。 后端优化要考虑的问题,就是如何从这些带有噪声的数据中估计整个系统的状态,以及这个状态估计的不确定性有多大——这称为最大后验概率估计(Maximum-a-Posteriori,MAP)。这里的状态既包括机器人自身的轨迹,也包含地图。
回环检测(Loop Closing)。回环检测判断机器人是否到达过先前的位置。如果检测到回环, 它会把信息提供给后端进行处理。主要解决位置估计随时间漂 移的问题。
建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
度量地图(Metric Map)
度量地图强调精确地表示地图中物体的位置关系,通常用稀疏(Sparse)与稠密(Dense)对其 分类。当查询某个空间位置时,地图能够给出该位置是否可以通过的信息。这样的 地图可以用于各种导航算法如astar.
拓扑地图(Topological Map)
拓扑地图是一个图(Graph), 由节点和边组成,只考虑节点间的连通性,例如 A、B 点是连通的,而不考虑如何从 A 点到达 B 点。
数学描述
运动方程:$u_k$ 是运动传感器的读数或者输入,$w_k$ 为该过程中加入的噪声。
观测方程:在 $xk $位置上看到某个 路标点$ y_j$,产生了一个观测数据 $z{k,j}$。$v_{k,j} $是这次观测里的噪声
这两个方程描述了最基本的 SLAM 问题:当知道 运动测量的读数$ u$,以及传感器的读数$ z$ 时,如何求解定位问题(估计$ x$)和建图问题(估计$ y$)? 这时,我们就把 SLAM 问题建模成了一个状态估计问题:如何通过带有噪声的测量数据,估计内部 的、隐藏着的状态变量?
三维刚体运动
旋转矩阵:矩阵由两组基之间的内积组成,刻画了旋转 前后同一个向量的坐标变换关系。同时,该矩阵各分量是两个坐标系基的内 积,由于基向量的长度为 1,所以实际上是各基向量的夹角之余弦。所以这个矩阵也叫方向余弦矩阵(Direction Cosine matrix)。
- 旋转矩阵是一个行列式为 1 的正交矩阵
SO(n) 特殊正交群(Special Orthogonal Group):n 维旋转矩阵的集合
齐次坐标和变换矩阵:可以把旋转和平移写在一个矩阵里面,使得整个关系变成线性关系
特殊欧氏群(Special Euclidean Group)
- T的逆变换
罗德里格斯公式:旋转向量到旋转矩阵的转换过程,符号 ∧ 是向量到反对称的转换符(对于外积引入的符号,记为反对称符号,把外积a×b写成了矩阵与向量的乘法,变成线性运算)
已知R求n和theta:转轴 n 是矩阵 R 特征值 1 对应的特征向量。
欧拉角
- 步骤
- 绕物体的 Z 轴旋转,得到偏航角 yaw;
- 绕旋转之后的 Y 轴旋转,得到俯仰角 pitch;
- 绕旋转之后的 X 轴旋转,得到滚转角 roll。
- 万向锁问题(Gimbal Lock):在俯仰角为 ±90◦ 时,第 一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由 3 次旋转变成了 2 次旋转)。欧拉角不适于插值和迭代,往往只用于人机交互中。我们也很少在 SLAM 程序中直接使用欧拉角表达姿态,同样不会在滤波或优化中使用欧拉角表达旋转(因为它具有奇异性)。
- 步骤
四元数
旋转矩阵用 9 个量描述 3 自由度的旋转,具有冗余性;欧拉角和旋转向量是紧凑的,但具有奇 异性。事实上,我们找不到不带奇异性的三维向量描述方式
在表达三维空间旋转时, 也有一种类似于复数的代数:四元数(Quaternion)。四元数是 Hamilton 找到的一种扩展的复数。它 既是紧凑的,也没有奇异性。如果说缺点,四元数不够直观,其运算稍复杂些。
一个四元数 q 拥有一个实部和三个虚部。
- 乘法是把 qa 的每一项与 qb 的每项相乘,最后相加
- 四元数乘法通常是不可交换的
- 两个四元数乘积的模即为模的乘积
- 四元数的共轭是把虚部取成相反数
- 四元数共轭与其本身相乘,会得到一个实四元数,其实部为模长的平方
- 逆:$q^{-1}=q^*/\left | q \right |^2 $
用四元数表示旋转,相当于把四元数的 3 个虚部与空间中的 3 个轴相对应。计算$p’=qpq^{-1}$.这里的乘法均为四元数乘法,结果也是四元数。最后把 p ′ 的虚部取出,即得旋转之后点的坐标。并且,计算结果的实部为 0,故为纯虚四元数。
四元数到其他旋转表示的转换
pass
在实际编程中,程序库 通常会为我们准备好各种形式之间的转换。无论是四元数、旋转矩阵还是轴角,它们都可以用来描 述同一个旋转。
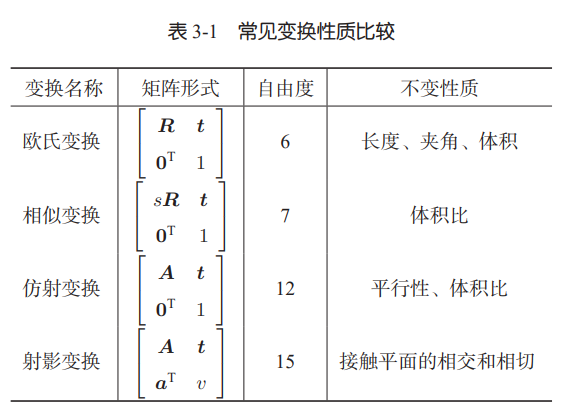
相似、仿射、射影变换
李群、李代数
相机与图像
相机模型
单目
- 可参考北邮《计算机视觉》笔记
双目
- 可参考北邮《计算机视觉》笔记
RGB-D
原理
- 通过红外结构光(Structured Light)
- 通过飞行时间法(Time-of-flight,ToF)
RGB-D 相机能够实时地测量每个像素点的距离。但是,由于这种发射 − 接收的测量方式,其使 用范围比较受限。用红外光进行深度值测量的 RGB-D 相机,容易受到日光或其他传感器发射的红外光干扰,因此不能在室外使用。在没有调制的情况下,同时使用多个 RGB-D 相机时也会相互干 扰。对于透射材质的物体,因为接收不到反射光,所以无法测量这些点的位置。此外,RGB-D 相机 在成本、功耗方面,都有一些劣势。
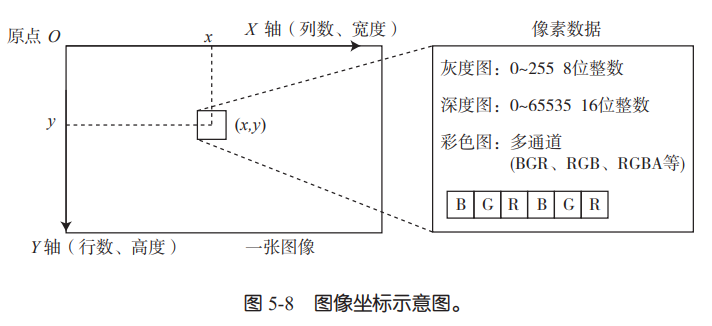
图像模型
非线性优化
- 理解最小二乘法的含义和处理方式。
- 理解高斯牛顿法(Gauss-Newton)、列文伯格—马夸尔特方法(LevenburgMarquadt)等下降策略。
- 学习 Ceres 库和 g2o 库的基本使用方法。