ROS学习笔记
本文最后更新于:2024年3月5日 09:31
主要内容:ROS相关重要知识点和遇到的问题
基本情况
安装
win10系统使用vmware workstation 16 pro安装ubuntu 20.04版本,ros系统选择noetic版本。
1 | |
上述步骤遇到网络问题,主要考虑在“软件与更新”中换中国的源(阿里、科大),然后主机使用手机热点联网。尝试过修改rawgithub的文件内容,把网站改成zhaoxuzuo的gitee(可能是现在gitee需要登录才行?)、给ubuntu装clash vpn尝试结果都不太行。
更新 2024年3月4日
在树莓派上安装 ubuntu20.04 支持 noetic 版本的 ros,可以用树莓派官方镜像下载服务器版本,然后再命令行安装(见 link, link2)
概念
ROS全称Robot Operating System(机器人操作系统)。在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。
文件系统
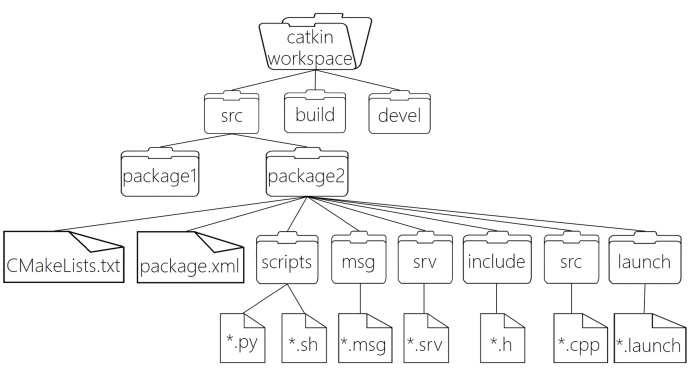
rqt_graph:可以显示节点关系
常用命令
1 | |
通信机制
话题通信(发布订阅模式)
基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。
用于不断更新的、少逻辑处理的数据传输场景。
模型
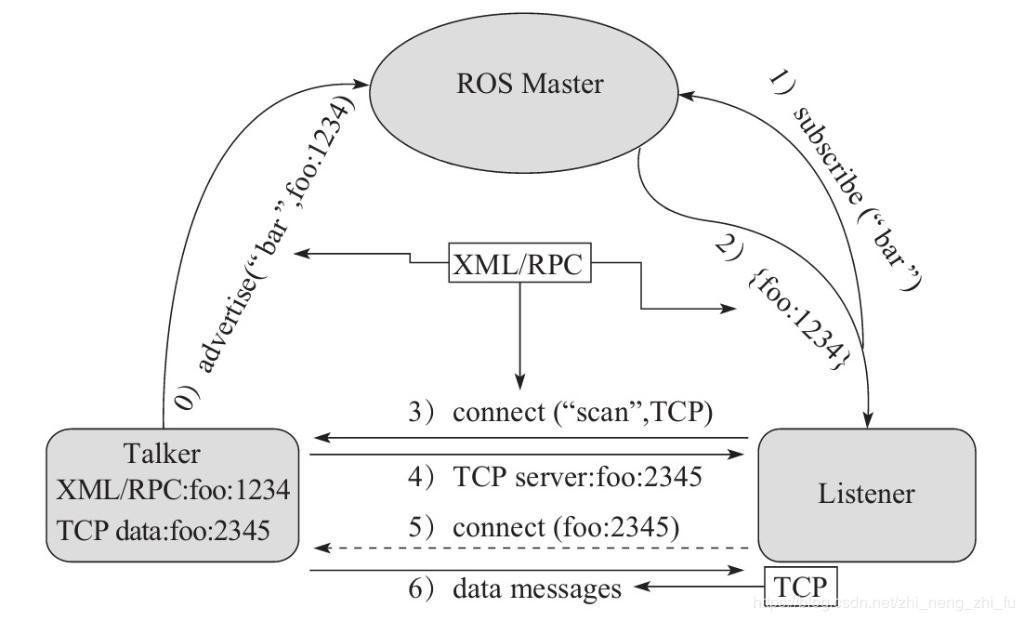
注意1:上述实现流程中,前五步使用的 RPC(Remote Procedure Call Protocol,远程过程调用)协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。
消息发布器一直循环发送msg到topic chatter上;消息订阅器一旦发现 chatter上有data,就会把msg放到一个队列回调函数中,但还未执行callback函数。当运行
ros::spin()和ros::spinOnce()时,就会执行callback函数。
一般ros::spin()后便不在写程序了,后面直接return 0。而ros::spinOnce()的使用比较灵活,但需要注意的是,在使用这个函数时,需要考虑到消息的调用时机、频率、以及消息池的大小,这个函数比较灵活,尤其是我想控制接收速度的时候。配合while (ros::ok())效果极佳。1
2
3
4
5
6ros::Rate loop_rate(10); //10Hz
while(ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}cpp文件在src下,python文件在script下
话题通信自定义msg
字段类型:int8, int16, int32, int64 (或者无符号类型: uint*)、float32, float64、string、time, duration、variable-length array[] and fixed-length array[C]、header
string类型在c++代码中要使用
.c_str()转换步骤主要包括:构建msg/my_msg.msg数据结构,主程序中需要对该对象进行描述、配置package.xml和CMakeLists.txt等
复习:Cpp中
.和->说明.是成员运算符,用于调取成员变量和成员函数;符号.的左边必须是实例对象(具体对象),举例为绿色字体;->是地址运算符,用于引用成员变量和成员函数;符号->的左边是实例对象的地址或者类名(结构名),举例为黄色字体;- 等价形式:d.msg() 和 (*constpt).msg() 等价
服务通信(请求响应模式)
服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
服务通信更适用于对实时性有要求、具有一定逻辑处理的应用场景。
模型
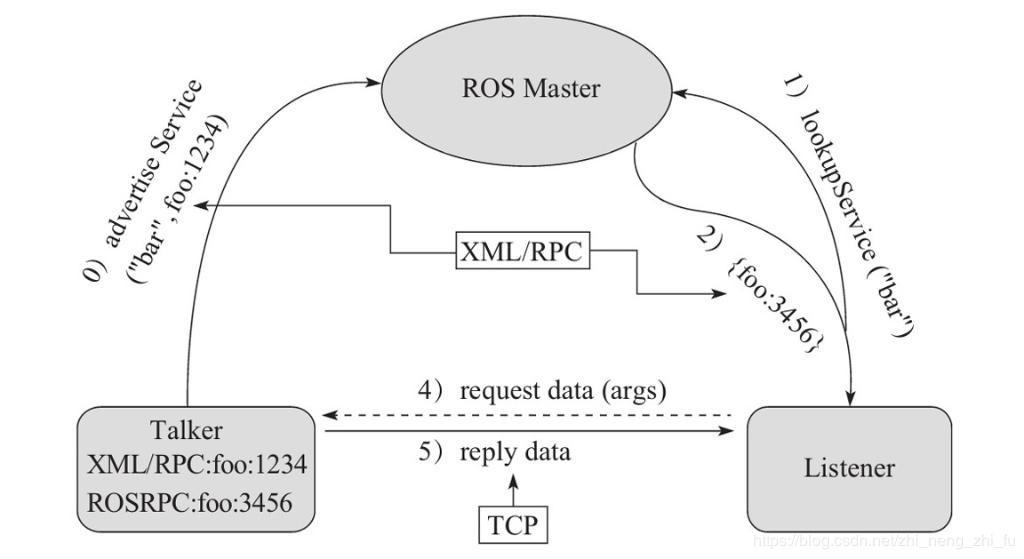
1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个。
服务通信自定义srv
- 字段类型、格式,请求和响应用
---隔开 - 步骤主要包括:构建srv/my_srv.srv数据结构,主程序中需要对该对象进行描述、配置package.xml和CMakeLists.txt等
- 字段类型、格式,请求和响应用
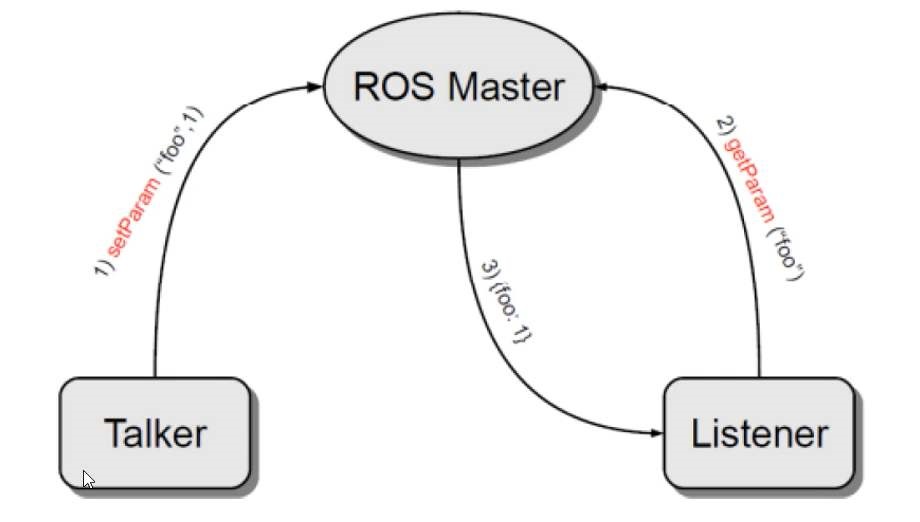
参数服务器(参数共享模式)
- 参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,不同的节点也可以往其中存储数据。
- 存储一些多节点共享的数据,类似于全局变量。
- 可以对参数进行增删改查。
模型
数据类型:32-bit integers、booleans、strings、doubles、iso8601 dates、lists、base64-encoded binary data、字典(参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据)
对比
| Topic(话题) | Service(服务) | |
|---|---|---|
| 通信模式 | 发布/订阅 | 请求/响应 |
| 同步性 | 异步 | 同步 |
| 底层协议 | ROSTCP/ROSUDP | ROSTCP/ROSUDP |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(一个 Server) |
| 通信数据 | msg | srv |
| 使用场景 | 连续高频的数据发布与接收:雷达、里程计 | 偶尔调用或执行某一项特定功能:拍照、语音识别 |
API
- 初始化
- 话题服务相关
- 回旋函数
- 时间
- 其他